

Skip to product information









![]()













Elephant Robotics: Mercury Wheeled Humanoid Robot Series
$7,561.95
Shipping calculated at checkout.
Contact
Wherever you are, our advisors will be delighted to assist you
Due to high demand your product will be shipped within 1-2 weeks
Product Delivery Details
For more information about the delivery time for this product, please contact our Client Advisors at:
Phone: +61 437 915 015
WhatsApp: +61 422 040 630
Product Details
Mercury:Unleash tomorrow today
“POWER SPRING” Robot Joint
All Mercury Robots now feature Elephant Robotics' newly developed Power-Spring" harmonic module. This innovative modular design comes standard with brakes and hollow cable routing, offering high precision, high inertia, and low weight. It delivers a maximum output torque of 20 Nm. The carbon fiber robotic arm shell further reduces overall weight and optimizes power performance.
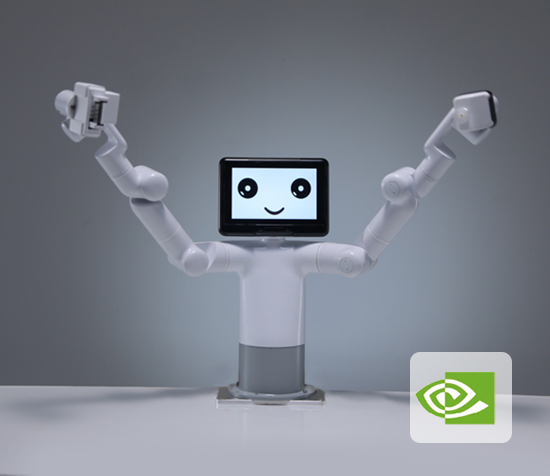
NVIDIA Computing Power
Mercury B1 and X1 humanoid robots now feature the NVIDIA Jetson Orin Nano (8GB core) as their main control module. This upgrade significantly boosts AI performance to 40 TOPS, nearly double the previous 21 TOPS, thanks to its 7nm process and Ampere architecture. This powers advanced perception, navigation, and planning algorithms. The Orin Nano offers greater computational flexibility with versatile Tensor Cores for complex, multi-modal AI tasks. Its CAN FD and more UART channels also improve robot motion control and industrial connectivity, unlocking endless possibilities for embodied intelligence.
Wheeled Humanoid Robot
Mercury Robot X1 is equipped with a high-efficiency wheeled mobile base for its high-performance arms. The mobile platform includes lidar, ultrasonic radar and visual guidance systems. The entire machine has a motion endurance of up to 8 hours, which can truly complete reliable mobile operations.
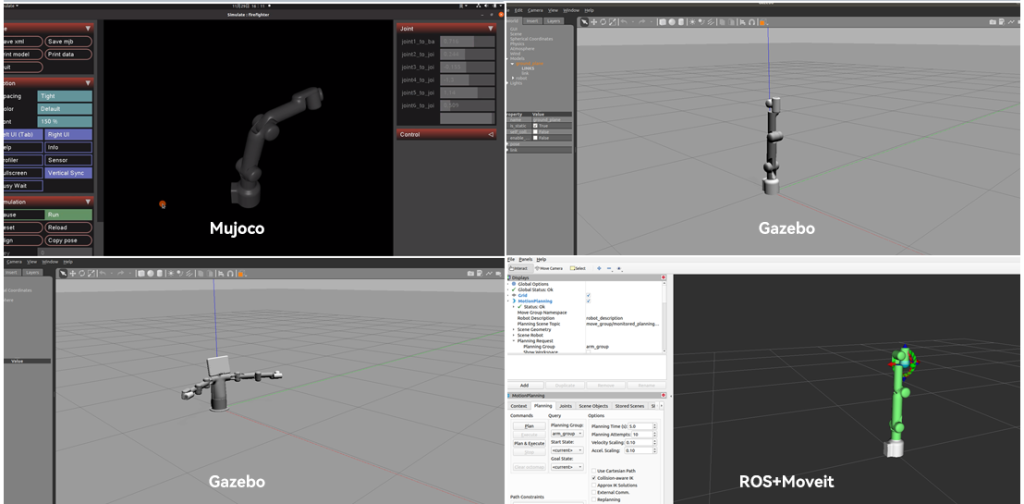
Diverse Software Ecosystem
The Mercury robot series adheres to the open source tradition of Elephant software and supports a rich software ecosystem and mainstream programming languages. It also supports mainstream simulation software including ROS, Moveit, Gazebo and Mujoco to improve the autonomous learning and rapid iteration capabilities of machine intelligence.
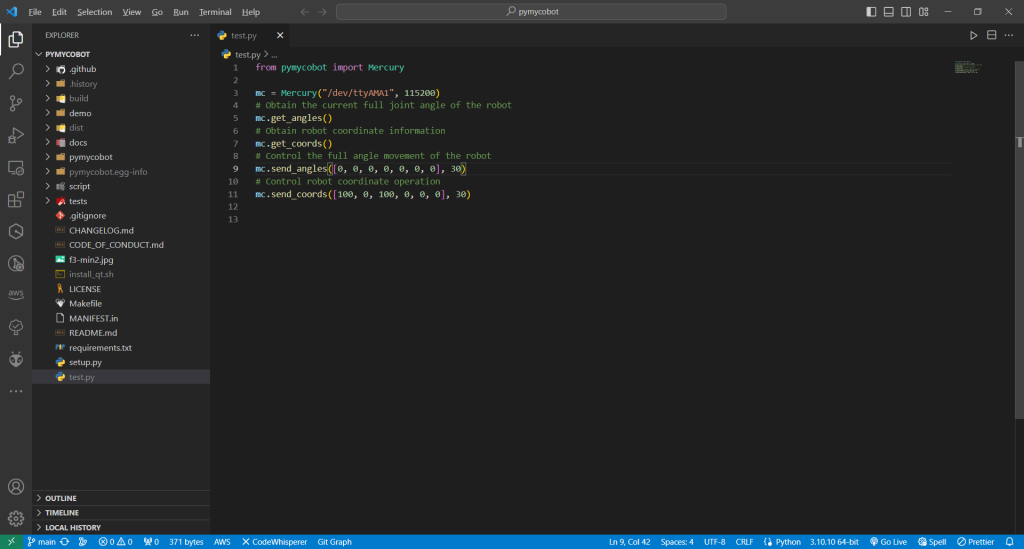
Support secondary development
Python API - pymycobot
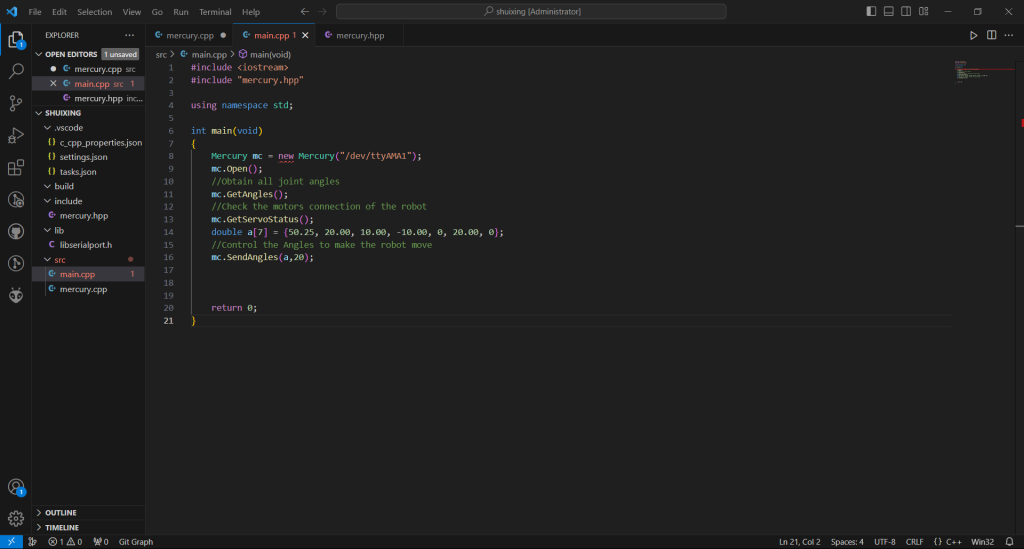
C++ API - Mercury
The Mercury API is a C++ control interface designed specifically for the Mercury robot. Simple and easy to use, it provides flexible control of robot joints, attitude and actuators, helping developers quickly implement different systems Robot-like applications.
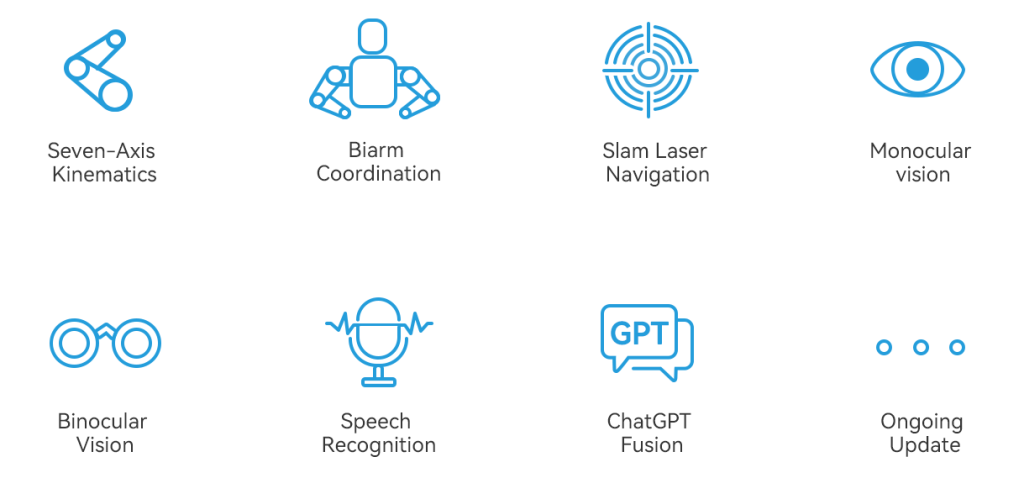
7 Integrated Algorithms To Create
For the first time, the Mercury robot product series integrates seven intelligent algorithms to overall improve the kinematics and dynamics performance of the robotic arm, suppress vibration, and ensure smooth coordination of both arms. Deep integration with vision, laser and voice sensors creates three-dimensional machine intelligence in an all-round way with the support of LLM.
Unleash The Power Of Mercury Effortlessly
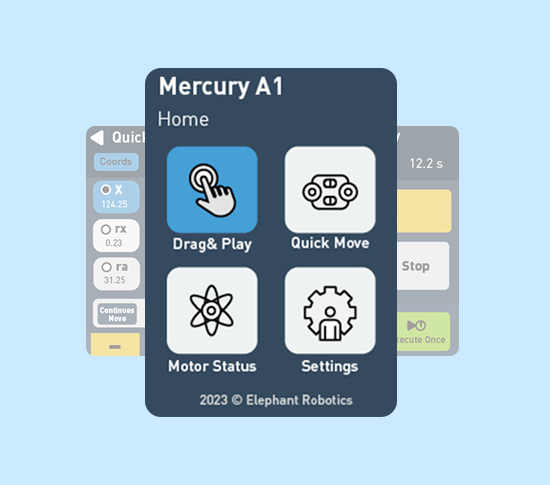
myPanel
The built-in "myPanel" of the Mercury A1 robotic arm is paired with a two-inch touch screen to enable rapid teaching, programming, deployment and debugging of the robotic arm without any additional hardware equipment.
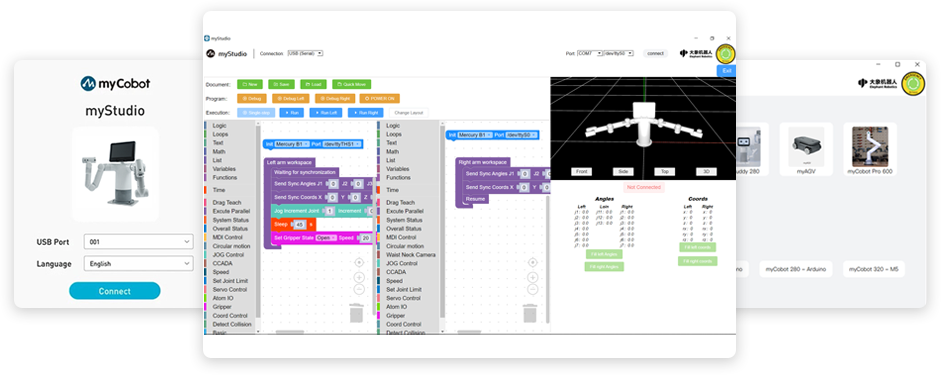
myBlockly
The new myBlockly innovatively develops a dual editing column function, which can be used to quickly program the left and right arms with preset shortcut commands, achieving efficient collaboration of 1+1>2.
Real-Time Exoskeleton Controller Manipulation
Paired with the myController S570 exoskeleton controller, it achieves 1:1 motion replication for precise control. This frees robot movements from the constraints of code, making actions smoother and more fluid. It meets the needs of various scenarios, such as embodied intelligence data collection and remote robot operation.
Expands Unlimited Scenarios
Education
Scientific Research
Commercial
Entertainment
Shipping & Returns
- Made-to-Order Luxury Products: Saunas and cold plunges require approximately 75 days to reach your doorstep. This timeframe includes production, quality assurance, and international freight.
- Robotics & Region Restrictions: Some robotics can only be shipped to specific regions due to safety, compliance, or supply chain restrictions. Please check the Shipping Policy on the product page before checkout or contact our team for tailored advice.
- Custom & Bulk Orders: If you require bulk quantities, business partnerships, or custom-tailored robotics and recovery solutions, please contact us directly via WhatsApp, phone, or email for bespoke shipping arrangements.
- Luxury Handling: All products are delivered with premium packaging and handling standards, ensuring safe and professional arrival.
What's Included
- Premium product packaging
- Authenticity certificate
- Care instructions
- Warranty information